OEM und Sonstiges
Allgemeines
Bildschirmspiel BSS-01
Größenrechner qpc-02
Schachcomputer SC-2
Schachcomputer Chess-Master CM
Schachcomputer Chess-Master Diamond
Bürodiktiergerät BDG2000
OEM-Baugruppensystem ZE1
OEM-Baugruppensystem K1510
OEM-Baugruppensystem K1520
RAM-Floppy RAF512
Baugruppensystem MMS-16
Steuerungssystem CNC600
Robotersteuerung IRS600
Industrierobotersteuerung SIR41
Programmierbare Kleinsteuerung EFE700
Logikanalysator LA32/20
Baugruppensystem "NANOS"
Laborautomatisierungssystem LAS 700
Logikanalysator LA 100
Programmierbare Kleinsteuerung PKS100
Speicherprogrammierbare Steuerung PROBIT HS-S2.2
Allgemeines
Auf dieser Seite werden Baugruppen und sonstige mikroelektronische Geräte vorgestellt, die zwar auch mit der DDR-Computertechnik zu tun gehabt haben, aber nicht so recht in die anderen Rubriken passen.
Bildschirmspiel BSS-01
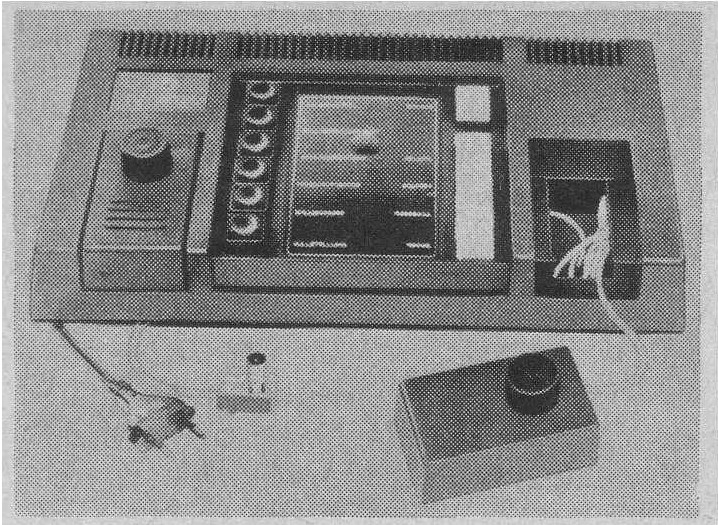
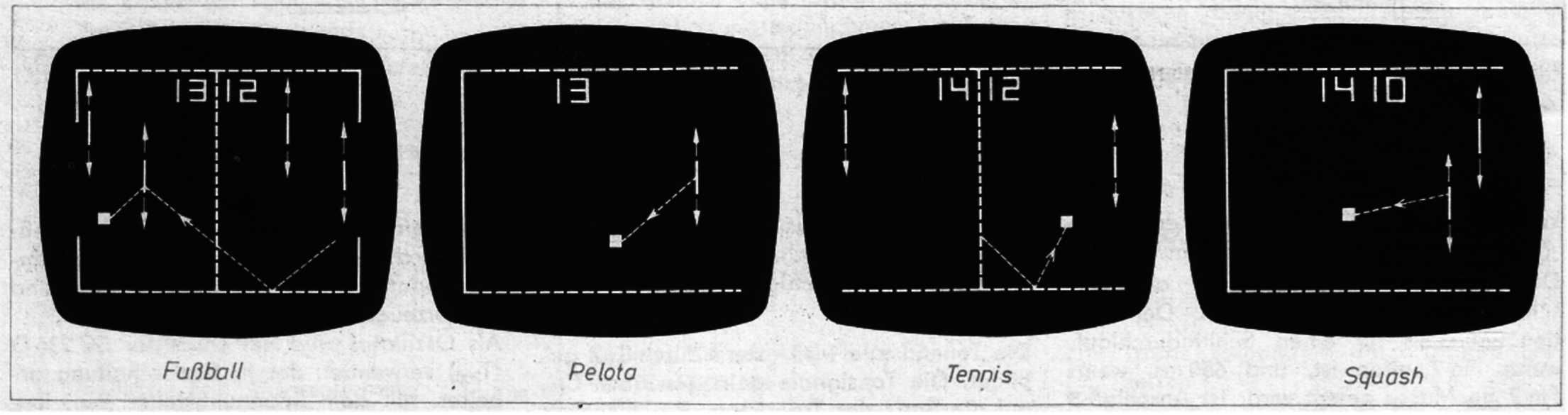
Das Bildschirmspielgerät BSS-01 aus der Konsumgüterproduktion des Halbleiterwerkes Frankfurt (oder) - HFO sollte Anfang der 80er Jahre das erste Gerät einer neuen Gerätegeneration sein, das als Zusatzgerät für normale TV-Empfänger die Simulierung von Sport- und Geschicklichkeitsspielen auf dem Bildschirm ermöglichte.
Der Anschluß erfolgt über die Antennenbuchse des TV-Gerätes. Die am Gerät wählbaren Spielarten sind Fußball, Tennis, Squash und Pelota.
Verschiedene Schwierigkeitsgrade sind einstellbar, Ballgeschwindigkeit, Balleinwurf, Ballreflexionswinkel und Schlägergröße lassen sich variieren. Der Begleitton wird im Bildschirmspielgerät erzeugt und auch dort abgestrahlt.
Die technische Grundlage für dieses Gerät bildete der NSW(=West)-Import-Schaltkreis AY-3-8500.
Eine ausführliche Beschreibung incl. Schaltbild kann der Literatur entnommen werden.
Siehe dazu auch eine "Insidergeschichte".
Literatur
Ing. Reinhard Wiesner: "Bildschimspiel BSS01" - Mitteilung aus dem VEB Halbleiterwerk Frankfurt/O., rfe 1980, H8, S511-512
Größenrechner qpc-02
Im Applikationszentrum Elektronik Berlin - AEB wurde viele Jahre lang (Ende der 70er/Anfang der 80er) ein Prototyp des wissenschaftlich-technischen Kleinrechners "qpc-2" entwickelt. Siehe hierzu eine "Insidergeschichte".
Mit diesem Rechner konnte die automatisierte Umsetzung und Verarbeitung von Größen und Maßeinheiten erfolgen. Der Rechner hatte ein 8-bit-Mikroprozessorsystem mit 1-Kbyte-RAM, 14-Kbyte-ROM, 5x Parameterregister, 3-stufigen Stack, alphanumerische Tastatur und eine 16stellige Anzeige. Die Fehleranzeige erfolgte als umlaufender Text. Je nach Betriebsart arbeitete der "qpc-2" als nichtprogrammierbarer wissenschaftlich-technischer Größenrechner mit 20 Grundbefehlen oder als programmierbarer Rechner. Hierbei waren 4 Betriebsarten möglich:
Programmieren,
Editieren,
die schrittweise und
die geschlossene Programmabarbeitung.
12 Steuer- und 22 Grundbefehle waren in einem Softwarepaket von 8 Kbyte untergebracht. Eine weitere Ausgestaltung des Programmpaketes ermöglichte die Umrechnung von etwa 100 bis 200 verschiedene Maßeinheiten, z.B. sämtliche SI-Einheiten, veraltete technische und ausgewählte anglo-amerikanische Einheiten.
Die Ausgabe der errechneten Ergebnisse erfolgte in SI-Einheiten.
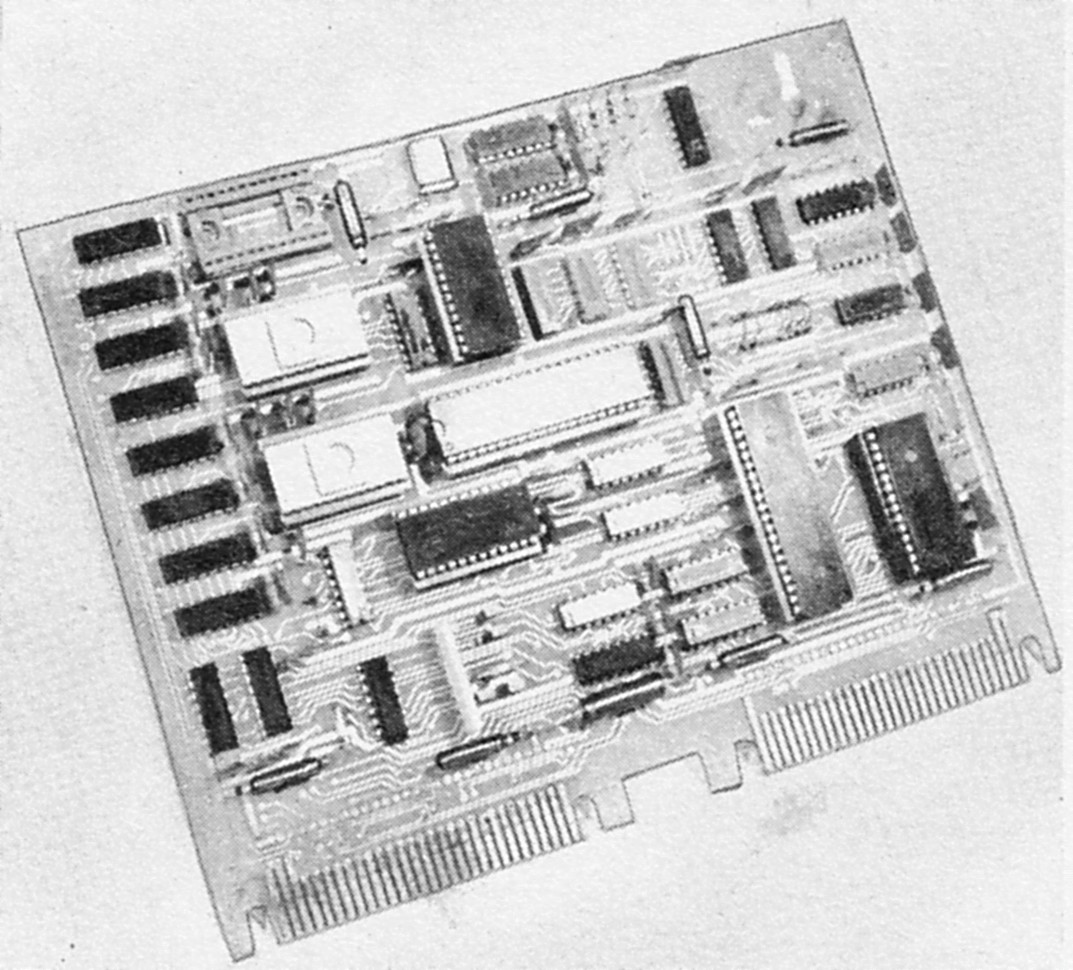
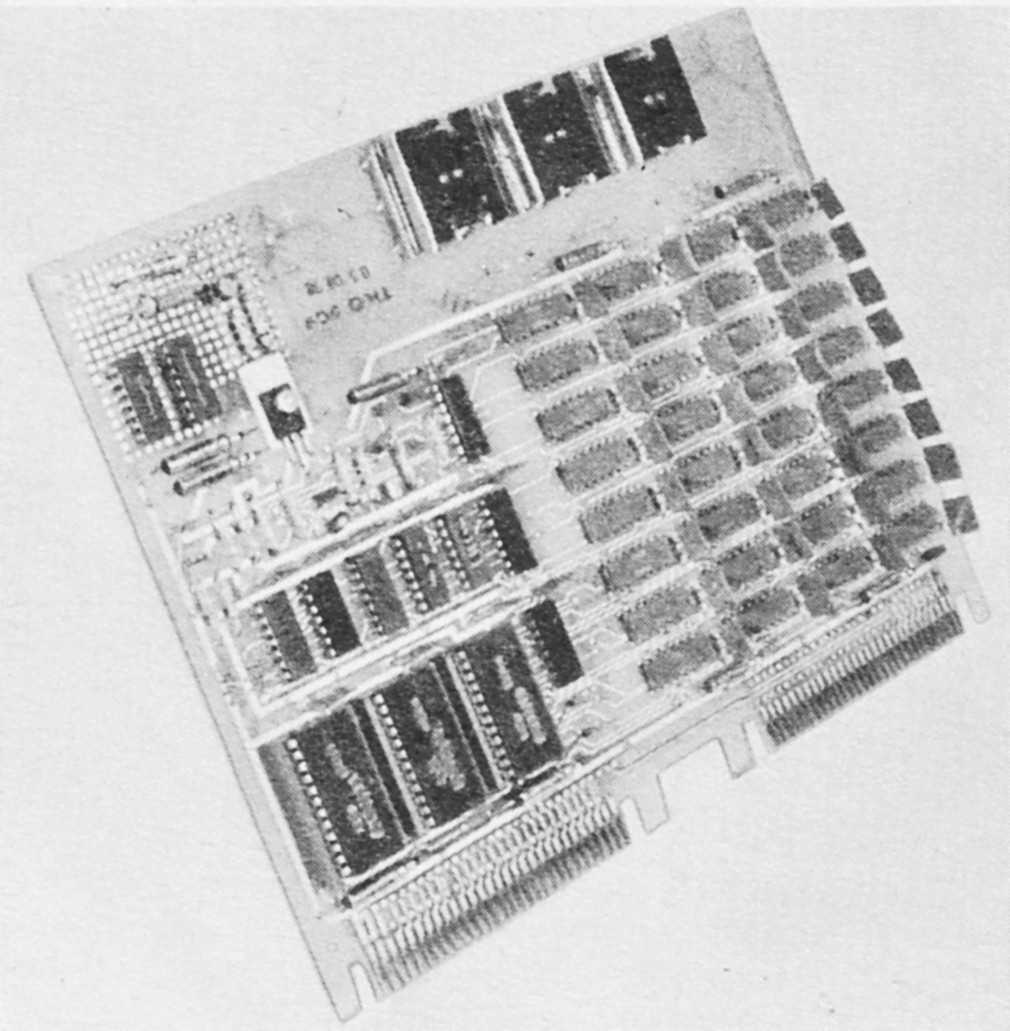
Schachcomputer SC-02
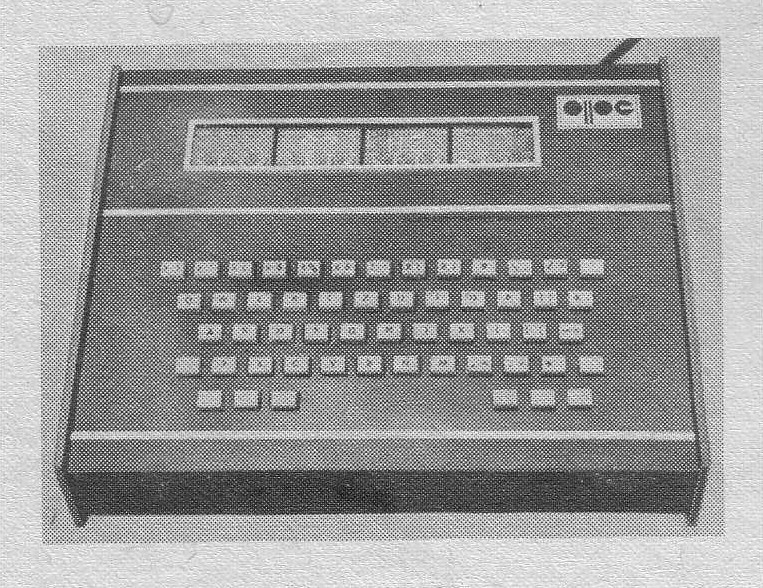
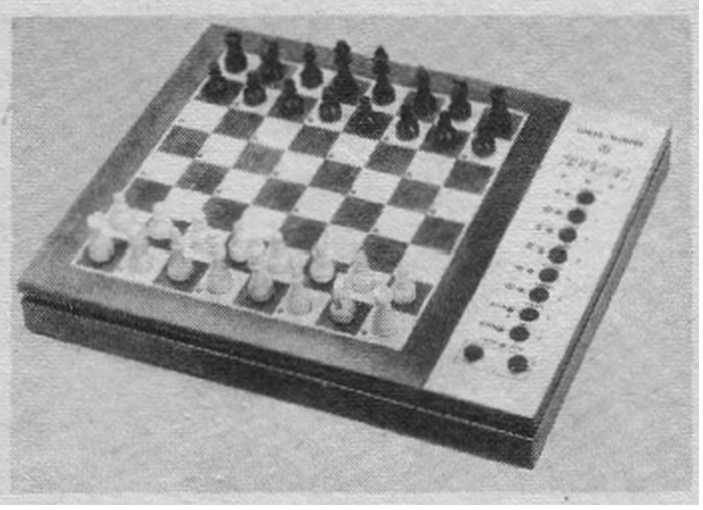
Der Schachcomputer SC 2 (interne FWE-Bezeichnung: G-5002.500) kam 1983 als Konsumgut aus dem Funkwerk Erfurt - FWE. Als Basis kam hierbei erstmalig auf diesem Sektor der eigene Mikroprozessor U 880 zum Einsatz.
Das Spielprogramm ist auf 9 Kbyte maskenprogrammierten ROM-Schaltkreisen untergebracht. Der benötigte RAM-Bereich beträgt 1 Kbyte.
Die beiden Leiterplattenbilder SC-02-Lp1 und SC-02-Lp2, sowie der Stromlaufplan dienen hier zur weiteren Dokumentation.
10 Programmstufen ermöglichen vom Anfänger bis zum fortgeschrittenen Spieler seine Fähigkeiten voll einzusetzen und zu erweitern.
Folgende Spielsituationen werden auch im Voraus erkannt bzw. angezeigt:
Patt des Computers
Voraus-Matt des Spielers
Matt des Computers
Voraus-Matt des Computers
Schachgebot des Computers
Matt des Spielers
Voraus-Matt des Spielers und Schachangebot des Computers
Voraus-Matt des Computers und Schachgebot des Spielers
Patt des Spielers
Schachgebot des Spielers.
Technische Kennwerte
Informationseingabe
| Tastatur | 15 Tasten für Funktionen, Zug- und Stellungseingaben |
| Rückstellen R | alle Figuren werden in die Ausgangsstellung gebracht |
| Löschen L | Löschen der Anzeigen, Löschen von nichtquittierten Zugeingaben |
| Programmstufen K | 10, einstellbar |
| Figurenwahl W | SC 2 spielt mit den weißen Figuren |
| Quittierung Q | Quittierung (Gültigmachen) von Zug- und Stellungseingaben |
| Stellungsabfrage Q | je Tastendruck (nach Zugausgabe oder Problemeingabe) wird eine Figur und deren Stellung angezeigt |
| Problemeingabe P | Umschaltung zum Aufstellen und Entfernen von Figuren |
| Tonabschaltung T | Aus- bzw. Einschalten des Signaltones |
| optisch | vierstellige Siebensegmentanzeige und zwei Lichtemitterdioden |
| akustisch (abschaltbar) |
Doppelton bei Netzanschluß und Rückstellen; Einfachton bei jederTastenbetätigung, bei Zugausgabe und Ablauf der Bedenkzeit des Spielers (mit Wiederholung) |
| Sonderzüge und -stellungen |
SC 2 erkennt und führt Rochade aus, erkennt und schlägt En passant, Bauernumwandlung in eine Dame, erkennt Patt-Stellung |
| Stromversorgung | Netzspannung 220 V/50 Hz |
| Abmessungen | 3940x240x60 (mm) |
| Masse | ca. 2,2kg (ohne Verpackung) |
Literatur
Dipl.-Ing. Udo Dietsch, Dipl.-Ing. Herbert Deppe: Schachcomputer SC 2, rfe 1983, H3, S144-147
Schachcomputer "ChessMaster"
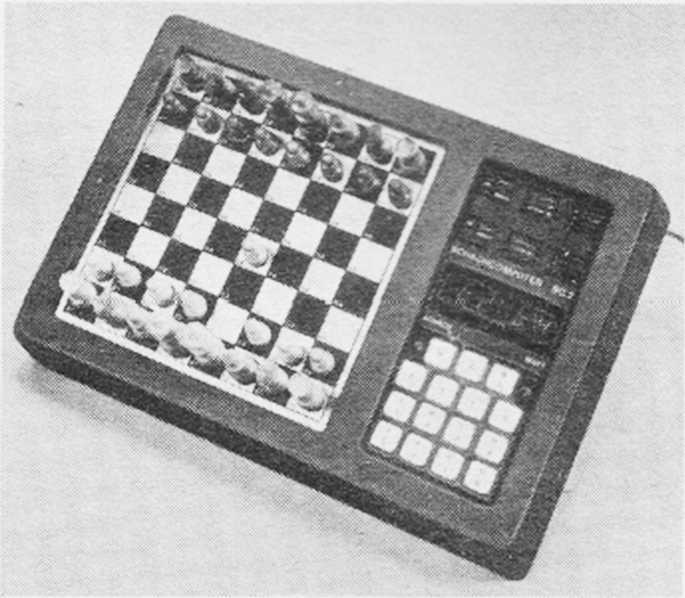
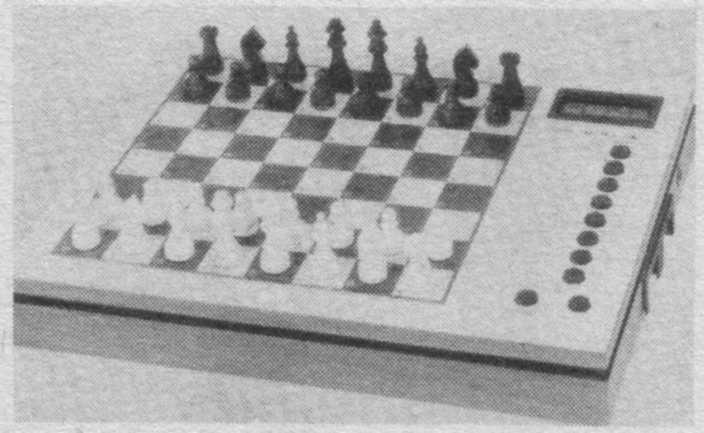
Der "Chess-Master CM" (interne FWE-Bezeichnung G-5003.500) sollte 1986 als Nachfolgegerät des SC 2 die Grundlage für eine neue Generation von Schachcomputern werden. Eine neuartige Sensortechnologie in Verbindung mit leistungsfähiger Hard- und Software sollten wesentlich verbesserte Gebrauchseigenschaften garantieren.
Dazu gehörten:
das Holzgehäuse,
das Sensorschachbrett für Zugein- und Zugausgabe,
die höhere Spielstärke,
einfache Stellungsänderungen,
die Möglichkeit des Zugvorschlages durch den Computer,
der Zwang zum Sofortzug durch Halttaste, sowie
die Nutzung der Bedenkzeit des Gegners für die eigene Vorausberechnung (Permanent Brain).
Das Sensorschachbrett beinhaltet je Schachfeld einen Sensor, über den das Vorhandensein einer Figur auf dem betreffenden Feld registriert wird, sowie eine LED, die durch Leuchten bzw. Blinken den auszuführenden Zug einschließlich der Zugrichtung signalisiert. Beim Ziehen sowohl der eigenen als auch der Figuren des Computers erfolgt eine akustische Quittung.
Für die Wahl der Betriebsarten sind zehn Tasten vorhanden, die folgende Funktionen besitzen:
| New Game | Spielbeginn |
| Level | Spielstärke (8 Stufen) |
| Color | Farbwahl |
| Board | Stellungskorrektur, Problemeingabe |
| Selfplay | CM spielt abwechselnd für beide Seiten |
| Referee | CM hat nur Kontrollfunktion |
| Random | Zufallsgenrator (4 Stufen) |
| Hint | Zugvorschlag |
| Halt | Ausgabe eines Sofortzuges durch CM |
| Reset | Rücksetzen (als Sperre gegen zufälliges Berühren nur bei gemeinsamer Betätigung mit Taste Halt wirksam) |
Die ersten 8 Tasten besitzen Doppelfunktionen (wegen der Spiel- und Zufallsstufen), die durch funktionenzugeordnete LEDs signalisiert werden und bei Betätigung optisch und akustische quittiert werden. Durch softwaremäßige Maßnahmen wird eine übersichtliche und sichere Bedienerführung erreicht, die auch bei Fehlbedienung immer wieder in den gewünschten Ausgangszustand zurückführt.
Das Gerät besteht aus einer Rechnerleiterplatte und der Sensorbrett-Leiterplatte.
Rechnerleiterplatte
Basis ist wiederum der Mikroprozessor U 880 aus eigener Produktion mit einem 10-kByte-Programmspeicher auf 10x U 505 und einem 2-kByte-Arbeitspeicher-RAM, realisiert mit 4x U 214.
Sensor-Leiterplatte
Die Figurenerkennung auf dem Schachbrett erfolgt durch Hall-Sensoren, die sich in einer 8x8-Matrix gemeinsam mit den dazugehörenden LED's unter dem Schachbrett befinden. Kleine Dauermagnete in den Figuren ermöglichen die Standorterkennung. Die 8x8-Matrix wird gemeinsam mit der Eingabetastatur in einem zyklischen Multiplexprogramm bedient, außer, wenn das Schachprogramm abgearbeitet wird. Mittels Magnetfeldkompensation zweier entgegengerichteter Dauermagnete wird die Tastaturfunktion realisiert, wobei die an einem bestimmten Punkt erkannte Feldkompensation von den Hall-Sensoren erkannt wird. Kontaktprobleme sind bei derartigen Konstruktionen nicht möglich.
Weitere technische Details können dem Stromlaufplan entnommen werden.
Literatur
Dipl.-Ing. Dieter Schultze, Dipl.-Ing. Rüdiger Worbs: Schachcomputer Chess-Master CM, rfe 1986, H1, S19-21
Schachcomputer "Chess-Master Diamond"
 1988 wurde vom Funkwerk Erfurt die letzte Entwicklung auf dem Gebiet der Schachcomputer vorgestellt. Mit der internen Gerätebezeichnung G-5004.500 war das die unmittelbare Weiterentwicklung des "Chess-Masters CM".
1988 wurde vom Funkwerk Erfurt die letzte Entwicklung auf dem Gebiet der Schachcomputer vorgestellt. Mit der internen Gerätebezeichnung G-5004.500 war das die unmittelbare Weiterentwicklung des "Chess-Masters CM".
Die gesamte Hardware, außer der Stromversorung, ist auf zwei Leiterplatten untergebracht:
Rechnerleiterplatte
Eine U880-CPU bildet wiederum das "Herz" des Rechners, der jedoch diesmal mit 4 MHz getaktet wird. Das Grundprogramm umfaßt 16k und befindet sich in 2x U2364D45. Der Arbeitsspeicher mit 3k wird mit statischen CMOS-RAMs 6x U224D35 realisiert. Zwei PIOs verbinden den Rechner mit der Peripherie, d.h. Schachbrett, Tastatur usw. Für die Multiplex-Ansteuerung der 16-Segmentanzeige VQB201 sind entsprechende Treiber vorgesehen. Für die Programmerweiterung gibt es einen Bus-Steckverbinder, an dem alle wesentlichen Signale des Rechnersystems anliegen.
Sensorbrett-Leiterplatte
Die Sensorbrett-Leiterplatte ist ähnlich aufgebaut wie beim "CM", so daß sich hier weitere Erläuterungen erübrigen.
Die Stromversorgung ist als abgesetztes Netzteil, einem so genannten "AC-Adapter", konzipiert, der über einen international üblichen IEC-Steckverbinder an den 12V-AC-DC-Eingang des Schachcomputers angeschlossen wird.
Weitere technische Details können dem Stromlaufplan entnommen werden.
Literatur
Dipl.-Ing. Rainer Hinkeldein, Dipl.-Ing. Rüdiger Worbs: Schachcomputer Chess-Master Diamond, rfe 1988, H5, S316-312
Bürodiktiergrät "BDG2000"
 Bereits für 1984 wurde vom VEB Elektronik Gera eine Typenreihe professioneller Diktiergeräte angekündigt:
Bereits für 1984 wurde vom VEB Elektronik Gera eine Typenreihe professioneller Diktiergeräte angekündigt:
Technische Daten
Bandgeschwindigkeit
4,75 +/-5%
cm/s
Frequenzbereich
0,3 ... 5
kHz
Ausgangsleistung
0,5
W
Masse
6,5
kg
Leistungsaufnahme
35
W
Betriebszuverlässigkeit
3600
h
Stromversorgung
220 V +/-10%,
50 Hz
Abmessung in
mm
390 x 269 x
130
Laufwerkfunktionen
Start, Stop,
Index-Suchlauf Schnellöschung, Aufnahme
Geraätefunktionen
Aufnahmeautomatik, Aufnahmeempfindlichkeitsumschaltung (zweistufig),
Aufnahme über Fernbedienung, Telefonadapter, Lautstärkeregelung,
Klangblende, Bandendabschaltung, Warnton bei:
Bandende,
Bandende Vorwarnung, fehlende Kassette
Anschlußmöglichkeiten
Fernbedienungsmikrofon, Sekretärinnen-Fußschalter,
Stethoskop-Kopfhörer
OEM-Baugruppensystem "ZE1"
Literatur
Prof. Dr. sc. tech. Wolfgang Schwarz, Doz. Dr. sc. tech. Gernot Mayer, Prof. Dr. sc. tech. Dietrich Eckhardt: Mikrorechner - Wirkungsweise - Programmierung - Applikation, Berlin 1980, VEB Verlag Technik
OEM-Baugruppensystem "K1510"
Literatur
Wolfgang Reimann: Mikrorechnersystem K1510, rfe 28 (1979), H7, S421-424 (Teil 1), H8, S491-494 (Teil 2)
Stefan Götze, Werner Liebich, Heinz-Dietrich Wuttke: Mikrorechner-Entwicklungssystem mit K1510, rfe 29 (1980), H3, S156-158
OEM-Baugruppensystem "K1520"
Literatur
Dipl.-Ing. Bernhard Bader: Mikrorechnersystem K1520, rfe 28 (1979), H10, S616-620
Es gab allerdings auch spezielle Varianten der K1520-Baugruppen mit direkten Steckverbindern, die nicht von ROBOTRON produziert wurden und somit auch nicht dem allgemeinen K1520-OEM-System zugerechnet werden können. Ein Beispiel dafür ist das weiter unten angegebene Steuerungssystem CNC600.
RAM-Floppy RAF512
Die RAM-Floppys wurden 1986 nicht vom Entwickler, dem "Zentrum für wissenschaftlichen Gerätebau" (ZWG) der AdW produziert, sondern es konnte eine kostenpflichtige Nachnutzung angefordert werden. Für den Entwickler war diese Verfahrensweise sehr vorteilhaft, denn somit war keine Einordnung in den Volkswirtschaftsplan notwendig und die damit verbundenen Bilanzarien für das Produkt mußten nicht erst durchgestanden werden, um zum Ziel zu kommen. Material-Beschaffungprobleme und möglicherweise notwendige TGL-Nachweise wurden auf den Anwender abgewälzt.
Die Nachnutzungsunterlagen bestanden aus:
- 1 Stück Leiterplatte (2 Ebenen, durchkontaktiert)
- Beschreibung (37 Seiten)
- Schaltplan
- Bestückungsplan
- Schaltteil-/Stückliste
- Programmierung von 2 Stück PROMs MH74S571/287
- Prüfanleitung
- Testsoftware (TURBO-Pascal-Programm, Source-Code, ca.20kB) ; Assembler-Programm, Source-Code ca.48kB)
- BIOS-Grundroutinen zur Einbindung einer RAF512 in ein CP/M-80-BIOS (Source-Code ca.12kB)
(benötigt werden ca. 50 Byte für READ/WRITE, 50 Byte zur Initialisierung und 300 Byte für Tabellen)
- BIOS-Beispielprogramm (Overlay) zur Installation von 1...4 RAM-Floppys (Source-Code ca. 34kB)
Weitere Leiterplatten konnten per Wirtschaftsvertrag direkt bei der Abt.EA, ZWG der AdW bestellt werden.
Die Unterlagen wurden - soweit wie vorhanden - komplett gescannt und liegen einschließlich einiger vollständig bestückter Leiterplatten  (ungeprüft) bei robotron-net vor.
(ungeprüft) bei robotron-net vor.
Nachtrag:
RAM-Floppys gab es auch von anderen Entwicklern, so z.B. als kleinere Variante mit 256k aus dem VEB Meßelektronik Dresden und dem VEB Elektronische Bauelemente Teltow. Beide Entwicklungen hatten nichts mit dem eigentlichen Produktionsprofil der betreffenden Betriebe zu tun, sondern waren das Ergebnis von ideenreichen Rationalisierungsmittel-Konstrukteuren, die ihr Wissen gern auch anderen zur Verfügung stellen wollten. Bei letzterem sogar mit detailliertem Schaltbild und Leiterplattenzeichnungen.
Weitere ausführliche Informationen -> siehe Literatur.
Literatur
Wolfram Kammer, Wolfgang Spindler: RAM-Disk für K1520-Systeme, VEB Elektronische Bauelemente Teltow, Mikroprozessortechnik 2(1988), H3, S74-78
Dr. Christian Löber: RAM-Floppy - ein schneller Zusatzspeicher für Bürocomputer, VEB Meßelektronik "Otto Schön" Dresden, Mikroprozessortechnik 1(1987), H3, S83-86
Baugruppensystem "MMS-16"
Steuerungssystem "CNC600"
 Das Steuerungssystem "CNC600" (CNC = Computerized Numerical Control) wurde vom VEB Numerik Karl-Marx-Stadt (jetzt Chemnitz) entwickelt und ab etwa 1980 produziert. Im Gegensatz zu vielen internationalen Vergleichsanlagen war die "CNC600" als zukunftsorientiertes Multi-Mikrorechner-System konzipiert und stellte ein leistungsfähiges numerisches Steuerungssystem für Fräs- Bohr-, Drehmaschinen und komplexe Metallbearbeitungszentren dar. Die technische Grundlage war das Mikroprozessorsytem der 2. Generation, d.h. U880. Das Gesamtsystem gliederte sich in vier Rechnerkomplexe:
Das Steuerungssystem "CNC600" (CNC = Computerized Numerical Control) wurde vom VEB Numerik Karl-Marx-Stadt (jetzt Chemnitz) entwickelt und ab etwa 1980 produziert. Im Gegensatz zu vielen internationalen Vergleichsanlagen war die "CNC600" als zukunftsorientiertes Multi-Mikrorechner-System konzipiert und stellte ein leistungsfähiges numerisches Steuerungssystem für Fräs- Bohr-, Drehmaschinen und komplexe Metallbearbeitungszentren dar. Die technische Grundlage war das Mikroprozessorsytem der 2. Generation, d.h. U880. Das Gesamtsystem gliederte sich in vier Rechnerkomplexe:
- Leitrechner
- Bedienblendenrechner
- PMC-Rechner (PMC = Programmable Machine Control)
- Wegesteuerungs- und Lageregelungsrechner
Das Prinzip-Schaltbild läßt den möglichen Ausbauumfang erkennen.
Es wurde voll auf die K1520-Technik gesetzt, aber die Baugruppen kamen nicht von ROBOTRON, sondern als Variante mit direkter Steckverbinder-Technik aus dem eigenen Hause.
Die "CNC600"-Entwicklung war die Antwort auf das Problem, daß Spitzenprodukte des DDR-Werkzeugmaschinenbaus sich im Laufe der 70er-Jahre ohne numerische Steuerungen auf dem Weltmarkt nicht mehr absetzen ließen. Der Werkzeugmaschinenbau war aber einer der wichtigsten Devisenbringer für die DDR-Volkswirtschaft. Somit war auch der Werkzeugmaschinenbau einer der Triebfedern bereits kurze Zeit nach Einführung der 1. Mikroprozessorgeneration (U808) gleich die 2. Generation mit dem wesentlich leistungsfähigeren System U880 einzuführen.
Zur Softwareausstattung der "CNC600" gehörten folgende Programmpakete:
- rechnerbezogene Programme (Betriebssystem),
- problembezogene Programme (Servicesystem),
- Anwenderprogramme
Eine Software-Übersicht gibt Auskunft zum Programmkomplex der "CNC600".
Weitere ausführliche Informationen -> siehe Literatur.
Literatur
Dr.-Ing. Günter Wollenberg, NPT: CNC600 - Ein numerisches Steuerungssystem auf Mikrorechnerbasis, rfe 28 (1979), H11, S694-700
Roboter-Steuerung "IRS600"
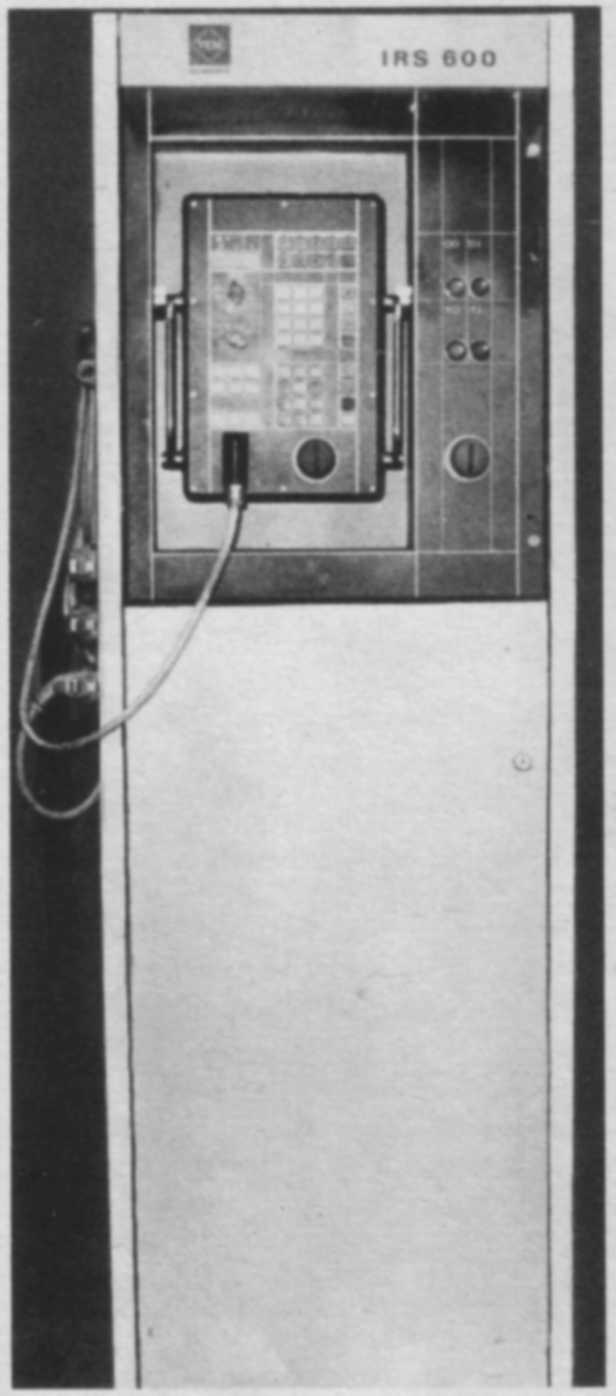 Gemäß der Forderung von Partei und Regierung zum forcierten Aufbau von Schlüsseltechnologien, wie es z.B. die damals häufig gebrauchten Schlagworte "CAD/CAM" und "Roboter-Einsatz" dokumentieren, wurde 1982 vom VEB Numerik Karl-Marx-Stadt die erste Robotersteuerung der DDR entwickelt. Basis war das bereits gut eingeführte K1520-System, allerdings ergänzt mit speziellen I/O-Baugruppen, die für den rauen Industrieeinsatz geeignet sein sollten. Diese Steuerung wurde für Beschickungsroboter in Zylinderkoordinatenbauweise mit 1 ... 3 lagegeregelten Achsen eingesetzt.
Gemäß der Forderung von Partei und Regierung zum forcierten Aufbau von Schlüsseltechnologien, wie es z.B. die damals häufig gebrauchten Schlagworte "CAD/CAM" und "Roboter-Einsatz" dokumentieren, wurde 1982 vom VEB Numerik Karl-Marx-Stadt die erste Robotersteuerung der DDR entwickelt. Basis war das bereits gut eingeführte K1520-System, allerdings ergänzt mit speziellen I/O-Baugruppen, die für den rauen Industrieeinsatz geeignet sein sollten. Diese Steuerung wurde für Beschickungsroboter in Zylinderkoordinatenbauweise mit 1 ... 3 lagegeregelten Achsen eingesetzt.
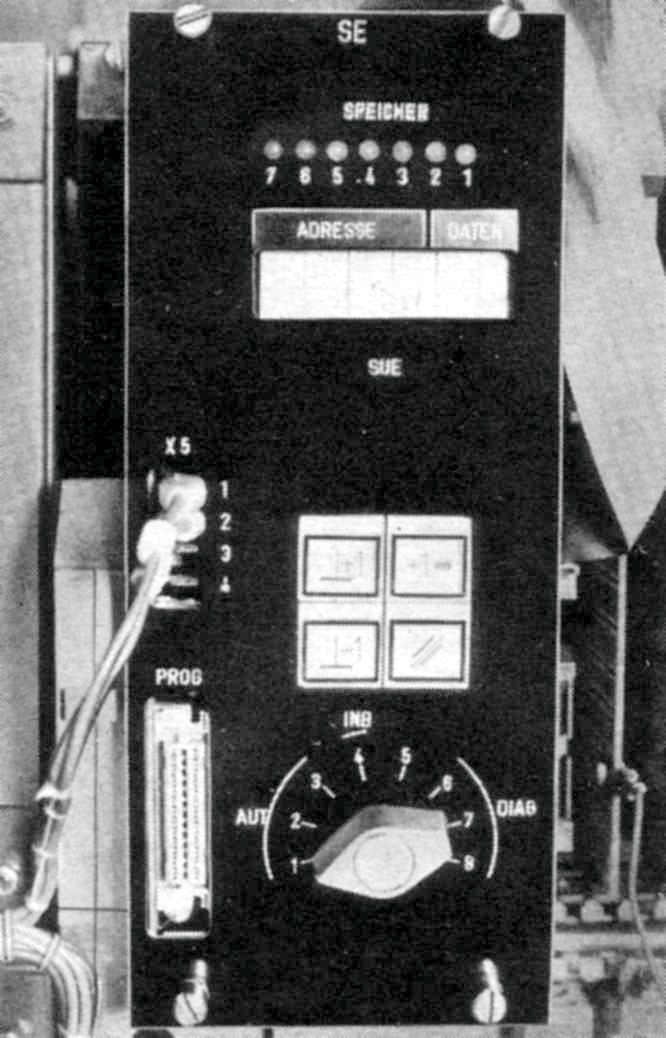 Für die offensichtlich häufig zu erwartenden Service- und Wartungsarbeiten ist extra im Steuerschrank eine Serviceeinheit vorgesehen. Diese besteht aus einer K1520-Steckeinheit mit vorgesetzter 100mm-Bedienblende, auf dieser sich eine 8-Bit-LED-Anzeige, ein Betriebsartenwahlschalter, verschiedenen Taster und ein Diagnose-Interface-Steckverbinder befinden.
Für die offensichtlich häufig zu erwartenden Service- und Wartungsarbeiten ist extra im Steuerschrank eine Serviceeinheit vorgesehen. Diese besteht aus einer K1520-Steckeinheit mit vorgesetzter 100mm-Bedienblende, auf dieser sich eine 8-Bit-LED-Anzeige, ein Betriebsartenwahlschalter, verschiedenen Taster und ein Diagnose-Interface-Steckverbinder befinden.
Im Steuerschrank ist Platz für insgesamt 24 Stück K1520-Baugruppen, einschließlich der umfangreichen Stromversorgung für den leistungselektronischen Teil.
Der praktische Betrieb beim Einsatz in der Produktion erforderte jedoch ein spezielles Bedientableau. Dieses so genannte "Teach-In-Tableau" wurde in der Nähe der Roboter-Mechanik installiert und damit die einzelnen Handhabungs-Vorgänge Schritt für Schritt programmiert. Programm-Aufbau und Programm-Ablauf geben Auskunft über die umfangreichen Software-Pakete, die zum Betreiben eines solchen Industrieroboters notwendig waren.
Weitere ausführliche Informationen -> siehe Literatur.
Literatur
Dipl.-Ing. Werner Barth, Dipl.-Phys. Hermann Gerstenberger, Dipl.-Ing. Joachim Hercht, Dipl.-Ing. Friedemann Reichel: "Robotersteuerung IRS600", rfe 31 (1982), H9, S563-566 (T1 Hardware); H10, S632-634 (T2 Software)
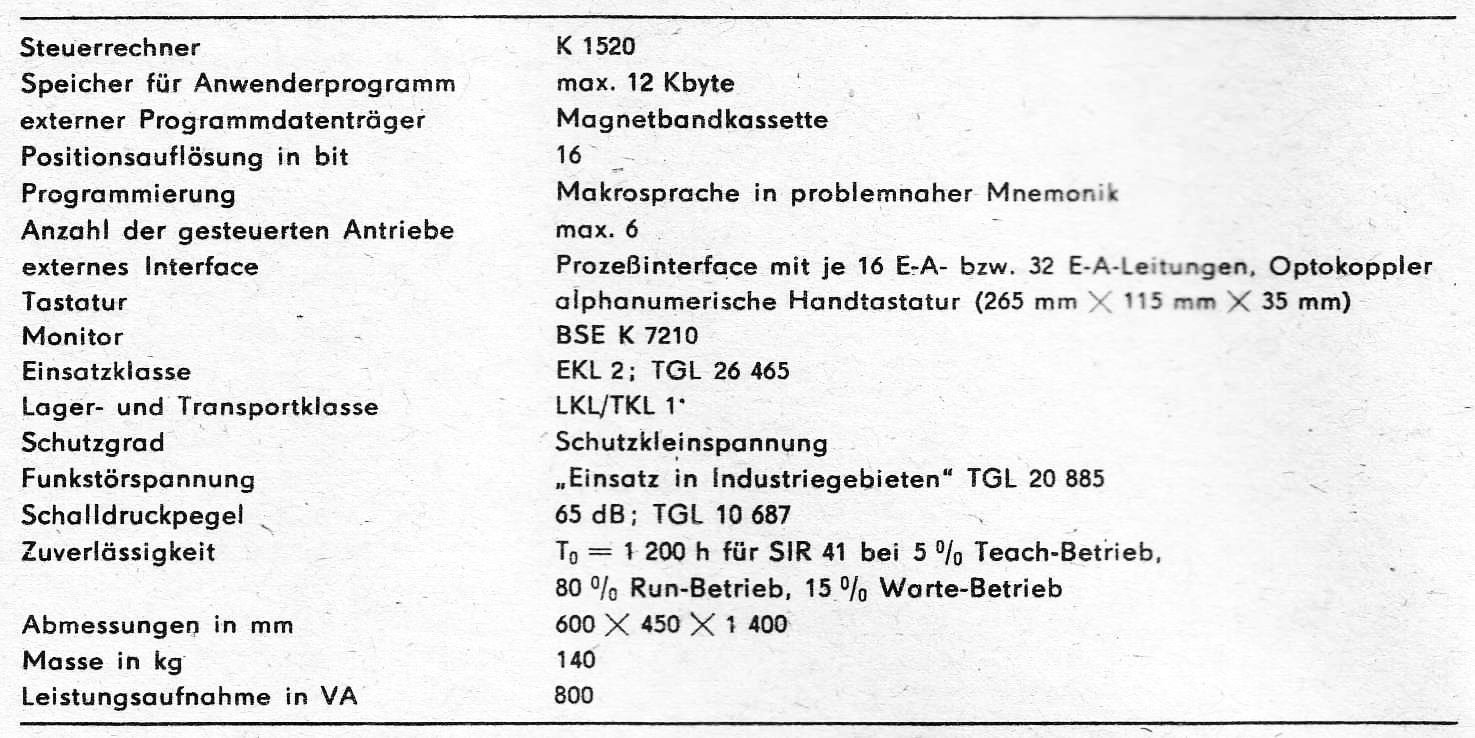
Industrieroboter-Steuerung "SIR41"
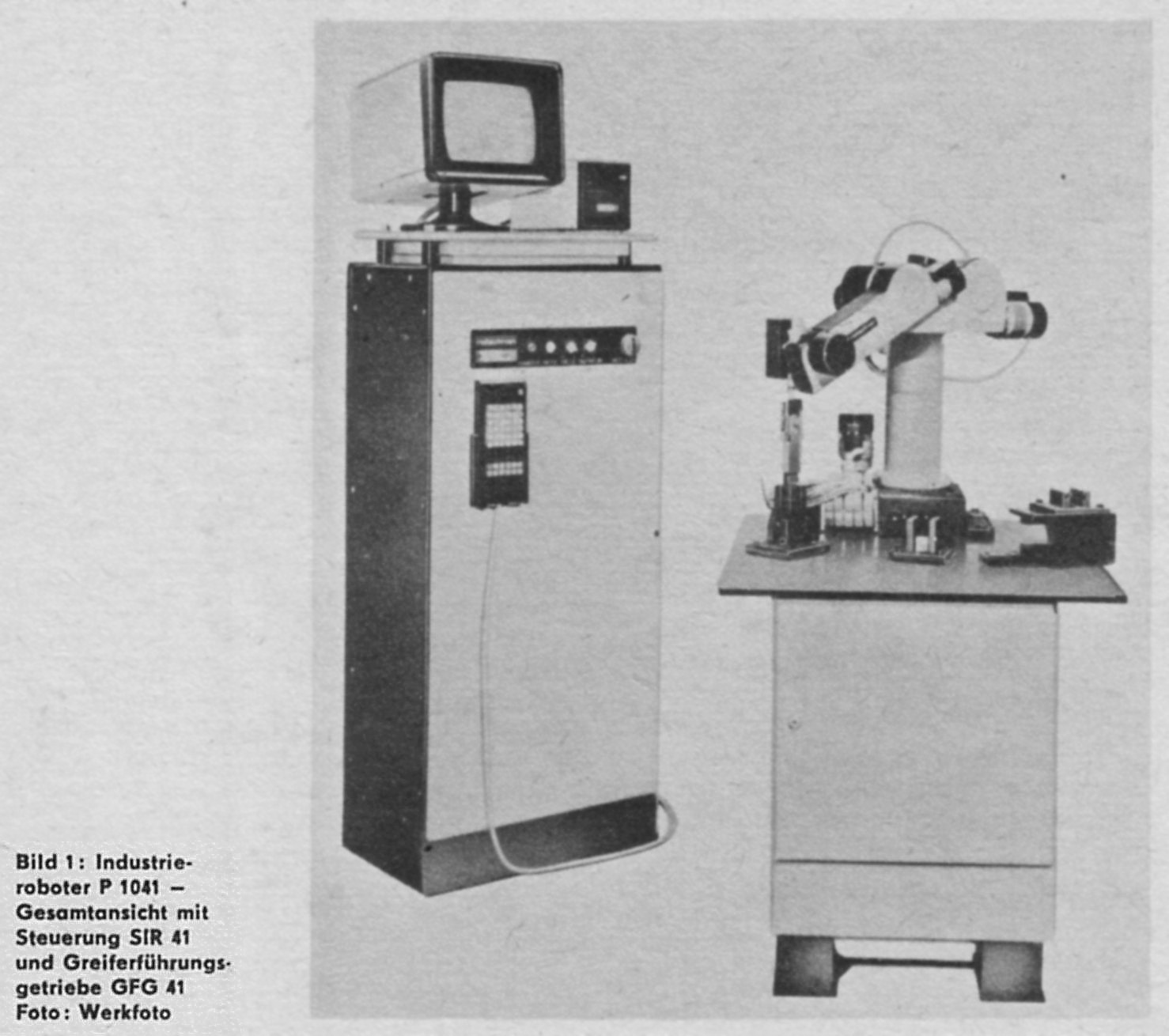 Die Industrierobotersteuerung SIR41 wurde als frei programmierbare Steuerung für das Greiferführungsgetriebe GFG41 vom VEB ROBOTRON-Rationalisierung Weimar hergestellt. Obwohl zum Einführungszeitraum Anfang 1985 die 8-Bit-Technik schon nicht mehr zeitgemäß war, wurde noch auf die Technik des Baugruppensystems K1520 gesetzt. Allerdings war im Gegensatz zur ISR600 nun ein Freiheitsgrad von bis zu 6 Achsen möglich. Damit stand dem Anwender für Handhabeprozesse bei Klein- und Mittelserien unter Einbeziehung einer Vielzahl anzufahrender Positionen bei jedem Arbeitsgang komplizierter, auch adaptiver Bewegungsabläufe, ein modernes Rationalisierungsmittel zur Verfügung. Bei der Montage von Kleinteilen (bis zu 0,5kg) war dies bei hoher Präzision (+/-0,15mm) einsetzbar.
Die Industrierobotersteuerung SIR41 wurde als frei programmierbare Steuerung für das Greiferführungsgetriebe GFG41 vom VEB ROBOTRON-Rationalisierung Weimar hergestellt. Obwohl zum Einführungszeitraum Anfang 1985 die 8-Bit-Technik schon nicht mehr zeitgemäß war, wurde noch auf die Technik des Baugruppensystems K1520 gesetzt. Allerdings war im Gegensatz zur ISR600 nun ein Freiheitsgrad von bis zu 6 Achsen möglich. Damit stand dem Anwender für Handhabeprozesse bei Klein- und Mittelserien unter Einbeziehung einer Vielzahl anzufahrender Positionen bei jedem Arbeitsgang komplizierter, auch adaptiver Bewegungsabläufe, ein modernes Rationalisierungsmittel zur Verfügung. Bei der Montage von Kleinteilen (bis zu 0,5kg) war dies bei hoher Präzision (+/-0,15mm) einsetzbar.
Die Struktur der SIR41 wurde nach einem hierachischem Konzept aufgebaut. Besonders hoher Aufwand wurde bei der Entwicklung der universellen Antriebssteuerung getrieben. Die Daten von Schrittmotoren (SM), kapazitive Winkelgeber (KWG), optische Winkelgeber (OWG) ergeben die Gelenkadress-Signale (GA1...GA7). Der Istpositionswert des entsprechenden Gelenkwinkels (IPOS = 16 Bit), die Sollgeschwindigkeit (V = 8 Bit) und die Phasenumschaltsignale (Y1/Y2) sind weitere Steuersignale, mit denen die Antriebe kontrolliert werden. Dabei werden die Sollströme der Wicklungen (IA/IB), die Wicklungsströme (W1 bis W8) und weitere Parameter überwacht.
Der eigentliche Steuerrechner besteht aus einem K1520-Steckeinheiteneinschub für maximal 11 Steckplätze. Das Blockschaltbild des Steuerrechners läßt eine einfache, klar gegliederte Struktur erkennen. Die Software in Form einer Ablaufsteuerung und die hier speziell angewendete Bahnsteuerung wurde mittels einer leicht verständlichen Robotersprache implementiert. In folgende Tabelle sind die technischen Hauptparameter dargestellt.
Weitere ausführliche Informationen -> siehe Literatur.
Literatur
Dipl.-Ing. Reinhard Langmann, Dr. sc. Michael Krapp, Dipl.-Ing. Michael Weingart: "Industrierobotersteuerung SIR41",
Mitteilung aus dem VEB Robotron-Rationalisierung Weimar, rfe 34 (1985), H2, S71-76
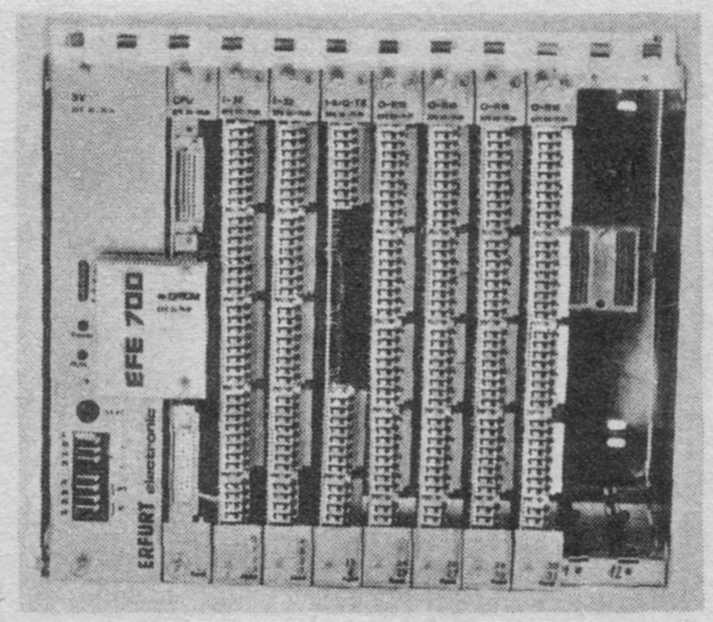
Programmierbare Kleinsteuerung "EFE700"
 Nach der erfolgreichen Entwicklung von Steuerungstechnik für großtechnische Anlagen, Robotertechnik usw. stellte sich Mitte der 80er Jahre heraus, daß damit in vielen Fällen die ökomomischen Ziele nicht erreichbar waren. Die Geräte waren in großen Stückzahlen nicht verfügbar und außerdem waren sie einfach viel zu teuer! (Zur Erinnerung: eine K1520-Baugruppe von ROBOTRON war nicht unter 1000 Mark zu haben - und derer gab es viele in den o.g. Steuerungen)
Nach der erfolgreichen Entwicklung von Steuerungstechnik für großtechnische Anlagen, Robotertechnik usw. stellte sich Mitte der 80er Jahre heraus, daß damit in vielen Fällen die ökomomischen Ziele nicht erreichbar waren. Die Geräte waren in großen Stückzahlen nicht verfügbar und außerdem waren sie einfach viel zu teuer! (Zur Erinnerung: eine K1520-Baugruppe von ROBOTRON war nicht unter 1000 Mark zu haben - und derer gab es viele in den o.g. Steuerungen)
Technische Daten
| Einsatzklasse nach TGL 9200 | +5/+55/+35/80//1102 |
| Schutzgrad | IP 00 |
| Nenngleichspannung | 24V+25/-15% max. 5 % Welligkeit |
| Leistungsaufnahme | 18W |
| mechanischer Aufbau | Kompaktkassette |
| Abmessungen der Varianten in mm | (1) 971 X 265 X 180 > (2) 222 X 265 X 180 (3) 324 X 265 X 180 (4) 400 X 265 X 180 > (5) 501 X 265 X 180 |
| Ein- und Ausgänge | max. 256 |
| Zeiten und Zähler | 16 Zeiten mit maximalem Zählwert 256 |
| Zeittakte | T1 = 0,1 s, T2 = 1 s, T3 = 1 min |
| Programmierbare Funktionen | logische Grundfunktionen, Klammerverarbeitung |
| Wortlänge | 2 Byte/Anweisung |
| Verarbeitungszeit | 0,8 ms/1000 Anweisungen |
| Ein- und Ausgabezeit | 2,7 ms/100 Ein- bzw. Ausgaben |
| Logikprogrammierspeicher EPROM | max. 2000 16-bit-Worte |
| Sonderprogrammspeicher | EPROM, max. 4 KByte |
| Inbetriebnahmespeicher | CMOS-RAM, 4 Kbyte, batteriegestützt, wahlweise als Logik- oder Sonderprogrammspeicher |
| Parameterspeicher | CMOS, 512 Byte, batteriegestützt |
| Schnittstelle | IFSS-Schnittstelle mit IEC-Steckverbinder, 25polig, vorzugsweise zum Anschluß der Programmiergeräte |
| Programmiertechnik | Bildschirmgeräte PRG 600-4 oder PRG 700, tragbares Programmiergerät TPG 700 |
| Ein- und Ausgabebaugruppen Eingabebaugruppe I-32 Eingabebaugruppe I-321 Ausgabebaugruppe O-T16
Ausgabebaugruppe O-R16
Ein-/Ausgabebaugruppe I-8/O-T8 Analogausgabebaugruppe D/A-4 |
32 Eingänge, 24 V (DC), plusschaltend 32 Eingänge für minusschaltenden Initiator 16 Transistorausgänge, plusschaltend, kurzschlußfest [4 X 24 V (DC), 2,2 A, 12 X 24 V, (DC),0,25 A] 16 Relais, (4 X RGS 13, 12 X GBR 12) 8 Transistorausgänge, plusschaltend, kurzschlußfest, [24 V (DC), 2,5 A] 8 Eingänge wie I-32, 8 Transistorausgänge, plusschaltend, kurzschlußfest, [24 V (DC), 500 mA] 4 Analogausgänge, -10...10 V, Auflösung 12 bit |
| Bedien- und Anzeigemodul BAM | 16stellige (5x7) Matrixanzeige, Folientastatur mit 32 Tasten |
Literatur
Dipl.-Ing. Klaus Schröter, Pritzke, B: "Anwendungsspezifische integrierte Schaltung U1504D in Standardzellentechnik" rfe 35 (1986), H5, S260-261
Dipl.-Ing. Gerhard Weißbach, Dipl.-Ing. Klaus Schröter, Dipl.-Ing. Wolfgang Hofmann: "Zentrale Verarbeitungseinhait in der programmierbaren Kleinsteuerung EFE700", rfe 35 (1986), H5, S284-286
Logikanalysator LA32/20
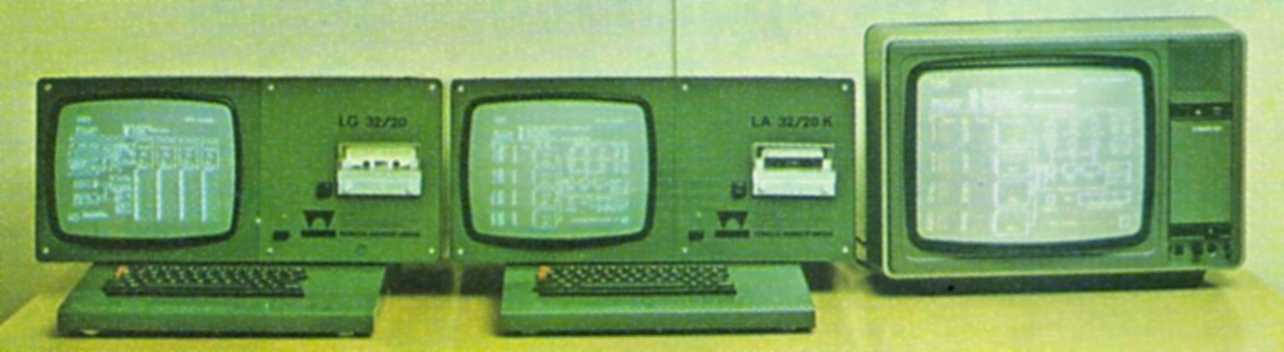
Die Konzeption des LA32/20 ist von der Struktur her mit den bewährten Baueinheiten des K1520-Systems aufgebaut. Dadurch konnte ein großer Teil der Hardware durch kommerziell erhältliche Baugruppen realisiert werden. Da auch ein quasigraphisches Farbdisplay QFD1520 vorgesehen war, kann man davon ausgehen, daß wegen der äußert schwierigen Beschaffung der Farbbildröhre aus dem NSW - wenn überhaupt - nur sehr geringe Stückzahlen gefertigt wurden. Eine Alternative war dann der Farbbildschirm des BWG1 DDR-Bildröhre A38 NCR 00X 05 (von WFB) zu verwenden, oder nur einen monochromatischen Bildschirm, d.h. den typischen ROBOTRON-"Grün"-Monitor.
Einen tieferen Einblick in die Hardware-Konzeption erlaubt das Prinzipschaltbild.
Mit der integrierten Basissoftware LABS 83 (ca. 48kB) wurde ein umfassendes Bedienrahmenprogramm geschaffen, wo über einen Start- und Anzeigedialog bereits grundlegende Bedienfunktionen integriert sind. Die Screens shots geben einen ersten Eindruck von der für damalige Verhältnisse recht modernen Benutzerdialog und technische Möglichkeiten.
Technische Daten:
Baugruppensystem "NANOS"
Literatur
Dipl.-Phys. Jörg Habetha: "Mikrorechnerbaugruppensystem NANOS ", AEB-Hauszeitschrift Applikative Information 1988, H5, S34-37
16-Bit Laborautomatisierungssystem LAS700
| Prozessorbasis | I8086, I80286 |
| Bezugssysteme | MMS-16-Bus (AMS-M-Bus) (RGW I41) EC1834-Bus (IBM-XT-Bus) EC1835-Bus (IBM-AT-Bus) |
| Rechner | A7100 A7150 EC1834 EC1835 |
| Betriebssysteme | CP/M 86; MS-DOS; UNIX RMX 86; SCP 1700; DCP; MUTOS; BOS 1810 |
| Hard-/Softwarekomponenten | Baugruppen-Module, Steckeinheiten Standardsoftware, spez. LAS700-Software |
Die Systemkonfigurationen und die technologischen Anforderungen mußten so aufeinander abgestimmt sein, daß verschiedene Steckkartengrößen und Steckverbinderarten unterschiedlicher Herkunft (EC1834, IBM usw.) der Baugruppen integrierbar sein konnte. Als Gefäßsystem wurde der EGS-4-Standard festgelegt. Damit waren Module mit maximal doppelten Europaformat (233,35mm x 160mm) und ein bis zwei Steckverbindern nach IEC-603-2 einsetzbar. Andere (kleinere) Formate sollten über Adapter realisiert werden.
Die Systemkonfiguration war in zwei Varianten vorgesehen:
- Add-in: Module für MMS-16-Bus und EC1834-Bus als Kompaktgerät
- Add-on: Beistellgefäß mit eigener Stromversorgung für "andere" Bussysteme und Koppelmöglichkeit über ein Anpassungsmodul an den MMS-16-Bus, EC1835-Bus oder den Fremdbus (z.B. CAMAC, K1520 usw.).
Interfacelösungen für Labor- und Meßtechnik sind über ein IMS-2-Interface anschließbar.
Ein Überblick der damals geplanten Baugruppen zeigt ein umfassendes Sortiment zu verschiedensten Aufgaben und Inhalten.
Dazu sind robotron-net einige neuere Dokumente zugetragen worden, die nun hier veröffentlicht werden sollen:
- Vorabinformation zum LAS700
- Baugruppen-Zusammenstellung des ZfK/AdW
- Arbeitsbericht zum LAS700-Pflichtenheft
Alles in allem könnte man von einem zukunftsträchtigen Programm sprechen, dessen Realisierung jedoch mit dem Ende der DDR in den Anfängen steckengeblieben ist. Außerdem ist zu beachten, daß die stark begrenzten "Produktionskapazitäten" der Zentralwerkstätten des wissenschaftlichen Gerätebaus (ZWG) der Akademie der Wissenschaften (AdW), der Hoch- und Fachschulen und anderer Institute in der Regel ausschließlich für den eigenen Bedarf zur Verfügung standen. Von einer Bedarfsdeckung für den allgemeinen Industriebedarf kann überhaupt keine Rede sein (Ausnahme: IfAM's).
Literatur
Prof. Dr. sc. tech. Gerhard Entress, Prof. Dr. sc. nat. Frank Baldeweg, Dr.-Ing. Kurt Gruppa, Dr.-Ing. Dieter Peters: 16-Bit-Laborautomatisierungssystem LAS 700, rfe 1990, H2, S111-114
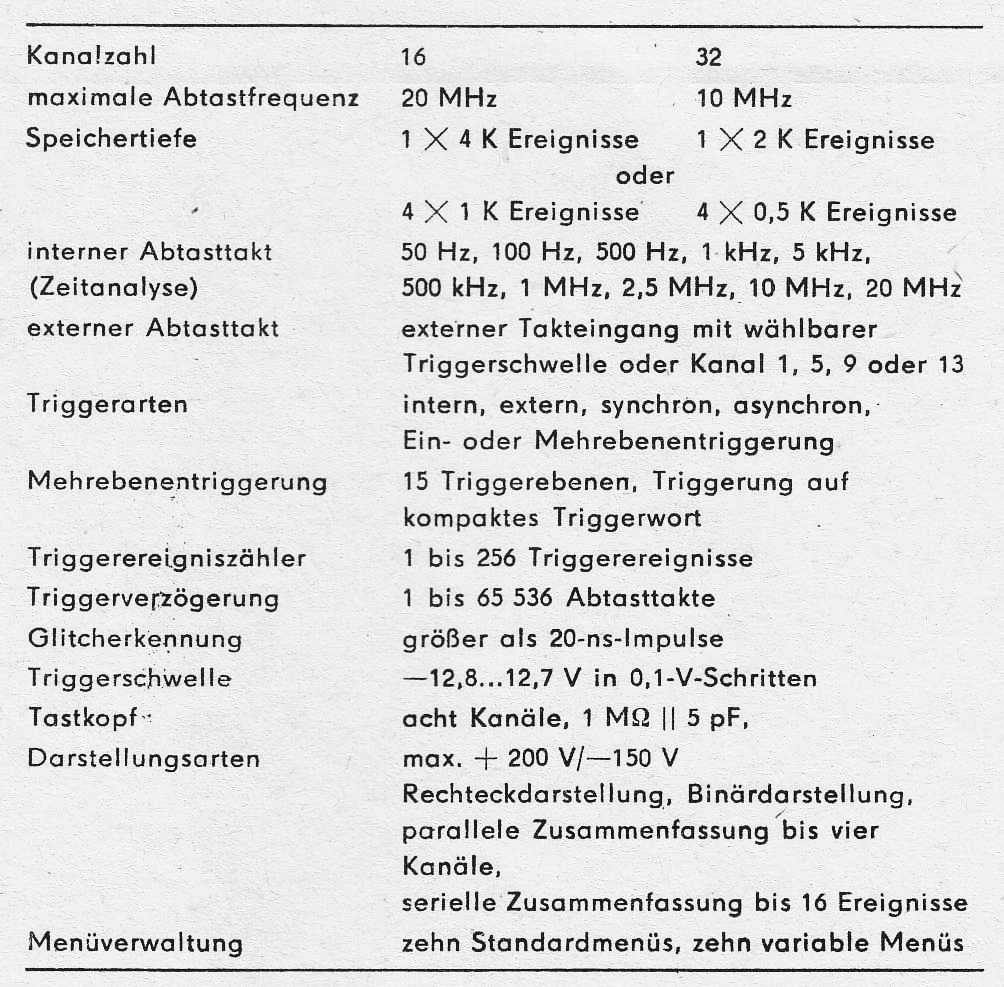
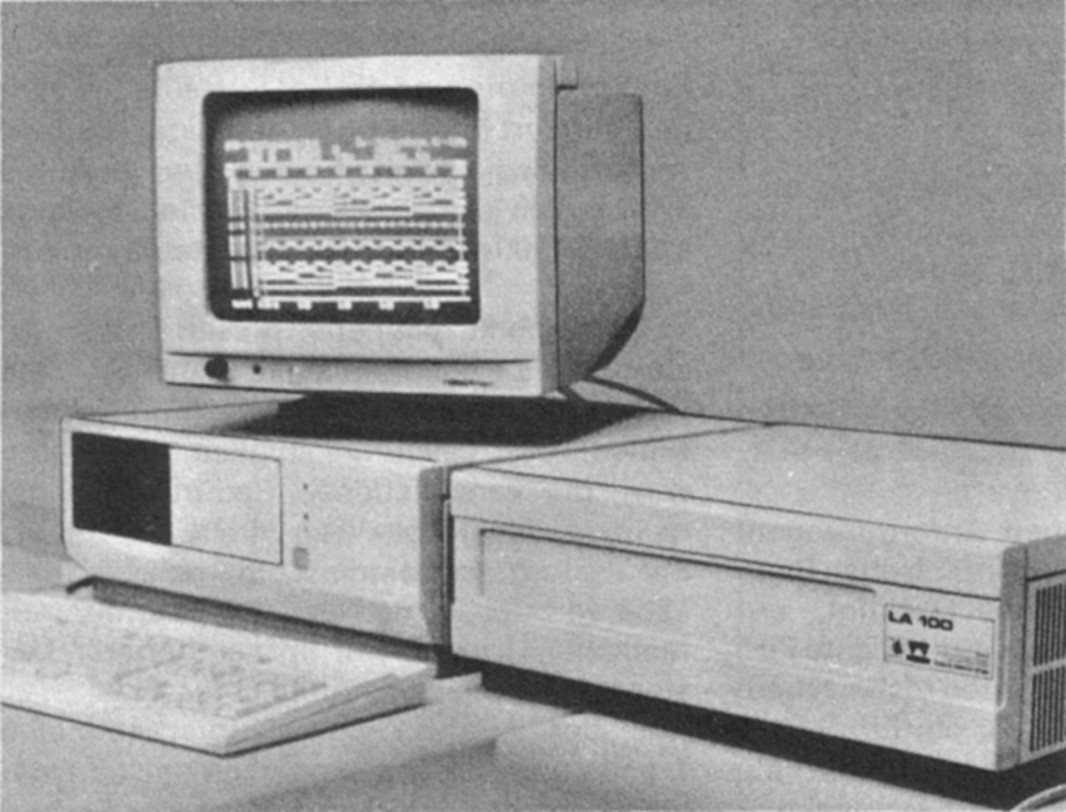
Logikanalysator LA100
Der LA100 wurde in zwei Varianten konzipiert:
.jpg)
Während der LA100B (links) mit einem Beistellgerät in einem, dem Arbeitsplatzcomputer A7150 ähnlichen Gehäuse konzipiert war, konnten die funktionsbestimmenden Baugruppen:
- Ansteuereinheit für den internen Bus des Analysesystems (AIM)
- Modulbuscontroller (MBC)
- bis zu fünf identische Messwertspeichermodule (LA100-MS)
- Steuerung der Logikanalyse-Hardware (LA100-ST)
in der Variante A7220 komplett in einem modifizierten Gefäßsystem des A7150 untergebracht werden - jedoch mit der Beschränkung auf maximal 3 LA100-MS mit 48 Datenkanälen (mit LA100B => 80 Datenkanäle) (LA100-Konzept). Die Ansteuerung der Interface-BG AIM erfolgt über den Controller-Externspeicher KES des A7150. Damit war zwar zunächst der für später auch noch geplante Einsatz des EC1834 als Bedien- und Verarbeitungssystem verbaut, aber auch dafür war eine Lösung in Vorbereitung.
Der LA100 arbeitet in 3 Betriebsarten:
- Normalmodus, Zeitanalyse mit interner Abtastfrequenz von 2Hz...25MHz
- Normalmodus, Zeitanalyse mit externer Abtastfrequenz von 0...25MHz
- Mixmodus, wobei sich durch unterschiedliche Ausstattung bei den Varianten LA100B und A7220 unterschiedliche Kanalzahlen und Abtastraten ergeben.
Als zentrales Bedien- und Verarbeitungssystem stand mit dem A7150 eine leistungsfähige Hardware zu Verfügung. Dazu wurde eine graphisch-orientierte Bediener-Oberfäche realisiert, in welche auch ein umfangreiches Hilfesystem integriert ist. Durch zahlreiche Dialog-Fenster:
- Start-Dialog
- Konfigurations-Dialog
- Aufzeichnungs-Dialog
- Qualifizierungs-Dialog
- Trigger-Dialog
- Sequenzer-Dialog
- Format-Dialog
ist eine übersichtliche, auch leicht intuitiv erlernbare Bedienung möglich.
Der LA100 sollte als Kleinserie im ZWG der TU Dresden gefertigt werden. Inwiefern dieses Vorhaben in den Wendewirren noch wirksam geworden ist, bzw. welche Anwender davon noch profitiert haben, ist leider bis heute unbekannt.
Weitere ausführliche Informationen können aus der angegebenen Literatur entnommen werden.
Literatur
Eichfeld, H., Götze, B., Meusel, K.-H.: Logikanalysator A7220 - Grundkonponente eines modularen Logikanalysesystems, Neue Technik im Büro, Berlin 33 (1989), H6, S168-171
Dr. sc. tech. Berndt Götze, Dr. sc. tech. Karl-Heinz Meusel: "Logikanalysator LA 100", rfe 1990, H8, S523-525, H9, S564-568
Programmierbare Kleinsteuerung PKS100
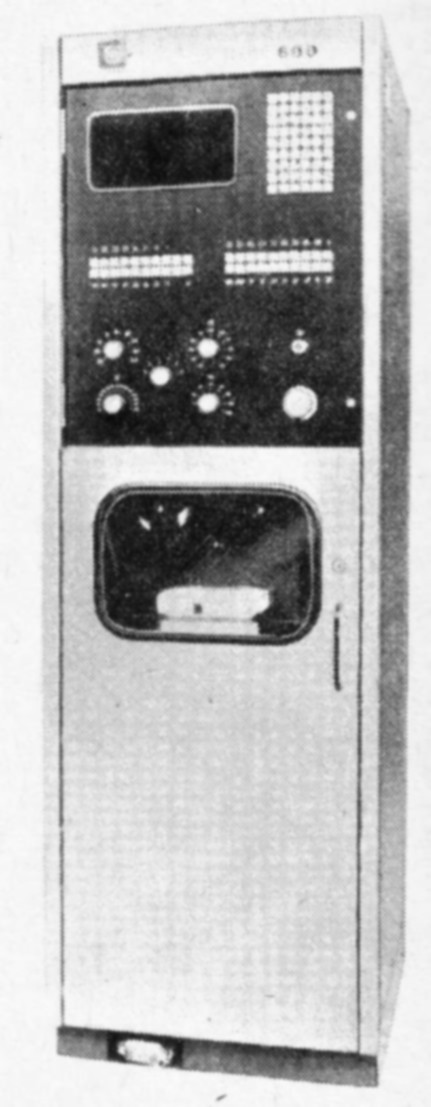
Programmierbare Steuerung PROBIT HS-S2.2
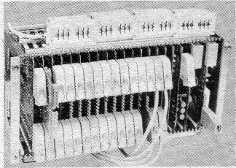 Das Bild zeigt eine speicherprogrammierbare Steuerung mit der Bezeichnung PROBIT HS-52.2 in maximaler Ausbaustufe, die seit über einem Jahr in größerer Anzahl in den verschiedensten
Industriezweigen der Volkswirtschaft zur Rationalisierung der Produktion eingesetzt wird.
Das Bild zeigt eine speicherprogrammierbare Steuerung mit der Bezeichnung PROBIT HS-52.2 in maximaler Ausbaustufe, die seit über einem Jahr in größerer Anzahl in den verschiedensten
Industriezweigen der Volkswirtschaft zur Rationalisierung der Produktion eingesetzt wird.
Kennzeichnend ist der äußerst einprägsame und einfache Befehlsaufbau, der es dem Technologen und Nichtfachkundigen der Elektrotechnik/Elektronik ermöglicht, technologische Probleme in mnemotechnischen PAPs auszudrücken. Der Befehlssatz besteht aus Fragebefehlen für Eingänge (FExx), Zeitstufen (FCyy), aus Setzbefehlen für Ausgänge (ASzx), Zeitstufen (SCyy), aus Löschbefehlen der Ausgänge (ALxx), Sprungbefehlen (SP aaa) und einigen weiteren Befehlen zur Sicherung der Funktionen der Probit. Das Programm wird seriell abgearbeitet, in sechs EPROMs U 552 abgelegt und steht in drei Prioritäten, Normalprogramm, Unterprogramm
und Interruptprogramm, zu je 256 byte zur Verfügung.
Dem Anwender stehen maximal 64 Eingänge, 64 Ausgänge und 16 analoge/digitale Zeitbaustufen zur Auswahl. Die Eingangsspannungen liegen im Bereich von 12...220 V, die Ausgänge sind mit Relais GBR10.1 kontaktbehaftet. Die Versorgung erfolgt über 15...30 V DC bei Leistungen bis 120 W. Es werden alle prozeßseitigen Steckverbinder (EFS) an den Anwender bereitgestellt, so daß nur das jeweilige Anpassungsprojekt bei den Ingenieurbüros und Betrieben anfällt, um ein technologisches Problem zu lösen.
Der Hersteller, der VEB Ziegelwerk Klausdorf., bietet ein fertiges konfigurierbares Gerät mit
Prospekt, technischer Dokumentation, schaltungstechnischer Dokumentation nach Vereinbarung, sowie Konsultationen an.
Interessenten wenden sich an den VEB Ziegelwerk Klausdorf, 1636 Blankenfelde, Dorf-Straße 33, Abt. KE
Soweit die damalige Verlautbarung.
Es ist schon sehr merkwürdig und ein Zeichen der Zeit, dass sich ein Ziegel-Hersteller mit der Produktion von SPS befasst.
Trotz der K1520-Baugröße handelte es sich infolge des Einsatzes von U552-EPROMs vermutlich nicht um K1520-Steckeinheiten. Möglicherweise ist sogar davon auszugehen, dass gar hier keine CPU-Steuerung (U808D ?) vorgelegen hat, sondern in fester Logik-Verdrahtung (TTL) lediglich die zu programmierenden Verknüpfungen mittels EPROMs vorgenommen wurden. Maximal 21 Leiterplatten konnten in dem EGS-Einschubrahmen untergebracht werden. An den frontseitigen Steckverbindern sind offensichtlich die Verbindungen zum Prozess-Interface möglich.
Interessant wären hierzu zweckdienliche Leser-Hinweise an robotron-net, wo und wie lange noch solche Geräte im Einsatz waren, bzw. ob und wo es vielleicht noch existierende Exemplare geben könnte.
Copyright © robotron-net.de, letzte Änderung 22.12.2015